Feature Matching - OpenCV(C++)
Updated:
D435를 이용해 Feature Matching 해보기
Visual Studio 2017을 사용하였습니다.
- Realsense SDK 2.0, OpenCV 사용
Feature Matching을 구현해보았습니다. SIFT, ORB, BRISK를 사용하였습니다.
#include <opencv2/opencv.hpp>
#include <opencv2/features2d.hpp>
#include <opencv2/videoio.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/calib3d.hpp>
#include <opencv2/highgui.hpp> //for imshow
#include <vector>
#include <iostream>
#include <iomanip>
#include <opencv2/features2d.hpp>
// #include <opencv2/xfeatures2d.hpp>
// using namespace cv;
using namespace std;
int main()
{
cv::Mat frame;
cv::Mat Refer_image;
cv::Mat Refer_gray_image;
cv::Mat Target_image;
cv::Mat Target_gray_image;
vector<cv::KeyPoint> TargetKeypoints, ReferenceKeypoints;
cv::Mat TargetDescriptor, ReferDescriptor;
cv::Ptr<cv::Feature2D> orb = cv::ORB::create(10);
cv::Ptr<cv::Feature2D> sift = cv::SIFT::create(500);
cv::Ptr<cv::Feature2D> brisk = cv::BRISK::create();
cv::Ptr<cv::DescriptorMatcher> Matcher_ORB = cv::BFMatcher::create(cv::NORM_HAMMING); // Brute-Force matcher create method
cv::Ptr<cv::DescriptorMatcher> Matcher_BRISK = cv::BFMatcher::create(cv::NORM_HAMMING); // Brute-Force matcher create method
cv::Ptr<cv::DescriptorMatcher> Matcher_SIFT = cv::BFMatcher::create(cv::NORM_L2); // Brute-Force matcher create method
vector<cv::DMatch> matches; // Class for matching keypoint descriptors.
cv::VideoCapture cap(0); // camera 연결
if (!cap.isOpened())
{
cerr << "카메라 열 수 없음." << endl;
return -1;
}
cout << "R 또는 r 버튼을 누르시면 References frame으로 선택됩니다. \n";
cout << "Reference Image를 선택한 후에 Target Image를 선택하시오. (프로그램 종료 : esc key)\n\n";
cout << "그 후 o(ORB), b(BRISK), s(SIFT)를 선택하시오.\n";
while (true) // 종료 시까지 영상 출력
{
cap.read(frame); // video 캡쳐 객체 받는 것(비디오의 한 프레임씩 읽음)
if (frame.empty())
{
cerr << "캡쳐 실패." << endl;
break;
}
imshow("Video", frame); // 현재 웹캠을 통해 실시간으로 받고 있는 영상을 보여주기
int key = cv::waitKey(10);
if (key == 27) // esc key 누르면 종료
break;
if ((key == 82) || (key == 114)) // 녹화 버튼(R 또는 r)을 눌렀을 때
{
cout << "References image으로 선택됩니다.\n\n";
Refer_image = frame; // 눌렀을 때의 해당 프레임을 Reference frame으로 선택
cv::cvtColor(Refer_image, Refer_gray_image, cv::COLOR_RGB2GRAY);
imshow("Reference Image", Refer_image); // References image 보여주기
imshow("Reference Gray Image", Refer_gray_image);
}
// 이제 타겟 이미지를 정해서 Refer frame과 feature matching을 실행할 것임
// O or o : ORB , B or b : BRISK, S or s : SIFT를 선택할 수 있도록 설정하기
//if ((key == 84) || (key == 116)) // Target Image(T 또는 t)을 눌렀을 때
if((key == 79) || (key == 111)) // ORB를 이용, Target image 선정
{
// References image에 대해 feature 뽑기
orb->detectAndCompute(Refer_gray_image, cv::Mat(), ReferenceKeypoints, ReferDescriptor);// detects keypoints and computes the descriptors
// Refer image에 대해 keypoint 찾은 거 보고 싶으면 주석 해제
cv::Mat sift_refer_result;
cv::drawKeypoints(Refer_gray_image, ReferenceKeypoints, sift_refer_result);
imshow("Result_sift_refer_result", sift_refer_result);
cout << "ORB를 선택하셨습니다. 해당 이미지를 Target image으로 선택합니다.\n\n";
Target_image = frame; // 눌렀을 때의 해당 프레임을 Target image으로 선택
cv::cvtColor(Target_image, Target_gray_image, cv::COLOR_RGB2GRAY);
imshow("Target Image", Target_image); // Target image 보여주기
imshow("Target Gray Image", Target_gray_image);
// Target image에 대해 feature 뽑기
orb->detectAndCompute(Target_gray_image, cv::Mat(), TargetKeypoints, TargetDescriptor);// detects keypoints and computes the descriptors
// Refer image와 Target image의 fature를 이용하여 Feature matching 실행
Matcher_ORB->match(TargetDescriptor, ReferDescriptor, matches); // Find the best match for each descriptor from a query set.
sort(matches.begin(), matches.end());
const int match_size = matches.size();
vector<cv::DMatch> good_matches(matches.begin(), matches.begin() + (int)(match_size * 0.5f));
cv::Mat Result;
cv::drawMatches(Target_gray_image, TargetKeypoints, Refer_gray_image, ReferenceKeypoints, matches, Result, cv::Scalar::all(-1), cv::Scalar(-1), vector<char>(), cv::DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
// Draws the found matches of keypoints from two images.
imshow("Matching Result_ORB", Result);
}
else if ((key == 66) || (key == 98)) // BRISK를 이용, Target image 선정
{
brisk->detectAndCompute(Refer_gray_image, cv::Mat(), ReferenceKeypoints, ReferDescriptor);
cout << "BRISK를 선택하셨습니다. 해당 이미지를 Target image으로 선택합니다.\n\n";
Target_image = frame; // 눌렀을 때의 해당 프레임을 Target image으로 선택
cv::cvtColor(Target_image, Target_gray_image, cv::COLOR_RGB2GRAY);
imshow("Target Image", Target_image); // Target image 보여주기
imshow("Target Gray Image", Target_gray_image);
brisk->detectAndCompute(Target_gray_image, cv::Mat(), TargetKeypoints, TargetDescriptor);
Matcher_BRISK->match(TargetDescriptor, ReferDescriptor, matches); // Find the best match for each descriptor from a query set.
Matcher_BRISK->match(ReferDescriptor, TargetDescriptor, matches);
double max_dist = 0.0, min_dist = 100.0;
for (int i = 0; i < matches.size(); i++)
{
double dist = matches[i].distance;
if (dist < min_dist)
min_dist = dist;
if (dist > max_dist)
max_dist = dist;
}
// drawing only good matches (dist less than 2*min_dist)
vector<cv::DMatch> good_matches;
for (int i = 0; i < matches.size(); i++)
{
if (matches[i].distance <= 2 * min_dist)
{
good_matches.push_back(matches[i]);
}
}
cv::Mat Result_BRISK;
cv::drawMatches(Target_gray_image, TargetKeypoints, Refer_gray_image, ReferenceKeypoints, good_matches, Result_BRISK, cv::Scalar::all(-1), cv::Scalar(-1), vector<char>(), cv::DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
// Draws the found matches of keypoints from two images.
imshow("Matching Result_BRISK", Result_BRISK);
}
else if ((key == 83) || (key == 115)) // SIFT를 이용, Target image 선정
{
sift->detectAndCompute(Refer_gray_image, cv::Mat(), ReferenceKeypoints, ReferDescriptor);
// Refer image에 대해 keypoint 찾은 거 보고 싶으면 주석 해제
/*cv::Mat sift_refer_result;
cv::drawKeypoints(Refer_gray_image, ReferenceKeypoints, sift_refer_result);
imshow("Result_sift_)resfer_result", sift_refer_result);*/
cout << "SIFT를 선택하셨습니다. 해당 이미지를 Target image으로 선택합니다.\n\n";
Target_image = frame; // 눌렀을 때의 해당 프레임을 Target image으로 선택
cv::cvtColor(Target_image, Target_gray_image, cv::COLOR_RGB2GRAY);
imshow("Target Image", Target_image); // Target image 보여주기
imshow("Target Gray Image", Target_gray_image);
//sift->detect(Target_gray_image, TargetKeypoints);
//sift->compute(Target_gray_image, TargetKeypoints, TargetDescriptor); // 예전 버전의 경우 이렇게 했어야 함
sift->detectAndCompute(Target_gray_image, cv::Mat(), TargetKeypoints, TargetDescriptor);
// Target image에 대해 keypoint 찾은 거 보고 싶으면 주석 해제
/*cv::Mat sift_target_result;
cv::drawKeypoints(Target_gray_image, TargetKeypoints, sift_target_result);
imshow("Result_sift_Target_result", sift_target_result);*/
// Refer image와 Target image의 fature를 이용하여 Feature matching 실행
Matcher_SIFT->match(TargetDescriptor, ReferDescriptor, matches); // Find the best match for each descriptor from a query set.
Matcher_SIFT->match(ReferDescriptor, TargetDescriptor, matches);
double max_dist = 0.0, min_dist = 100.0;
for (int i = 0; i < matches.size(); i++)
{
double dist = matches[i].distance;
if (dist < min_dist)
min_dist = dist;
if (dist > max_dist)
max_dist = dist;
}
// drawing only good matches (dist less than 2*min_dist)
vector<cv::DMatch> good_matches;
for (int i = 0; i < matches.size(); i++)
{
if (matches[i].distance <= 2 * min_dist)
{
good_matches.push_back(matches[i]);
}
}
cv::Mat Result_SIFT;
cv::drawMatches(Target_gray_image, TargetKeypoints, Refer_gray_image, ReferenceKeypoints, good_matches, Result_SIFT, cv::Scalar::all(-1), cv::Scalar(-1), vector<char>(), cv::DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
// Draws the found matches of keypoints from two images.
imshow("Matching Result_SIFT", Result_SIFT);
}
}
return 0;
}
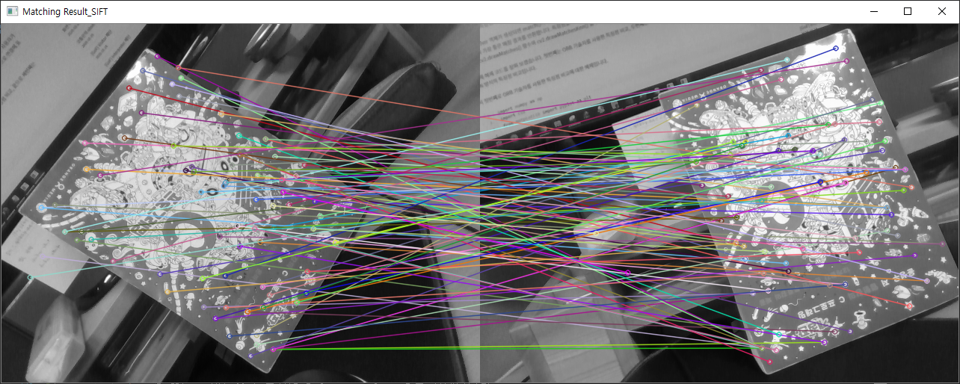
결과 이미지
-
ORB

-
BRISK

-
SIFT
Leave a comment